


会议
- 会议
- 资讯
中国科大在手功能精细运动康复机器人方向获重要进展
更新时间:2023-10-07
近日,中国科学技术大学张世武教授、金虎副教授与王柳特任教授基于手指皮肤非均匀形变机制和手部精细动作康复运动机制,以高功重比形状记忆合金(SMA)弹簧为驱动,提出了一种具备精细动作训练的便携式柔性康复手套机器人,有望服务全球数千万手功能障碍患者的精细动作康复与日常生活辅助。相关成果以 "A soft-packaged and portable rehabilitation glove capable of closed-loop fine motor skills" 为题的研究长文,10月5日在线发表于国际学术期刊《自然·机器智能》(Nature Machine Intelligence)。
全球手功能障碍患者群体日益庞大,仅因脑卒中每年新增近千万人。由于指间协调性、肌张力等异常,患者失去手部精细动作技能。重复与持续的手部运动训练可刺激大脑皮层与神经元,达到手功能康复目的。柔性康复手套具有轻质本体、柔顺运动等优势,可突破传统刚性手套安全冗余度低等缺点。但由于柔顺本体易发生大形变不利于运动感知、以及多传感及驱动集成极易使手套繁冗不利于便携化等原因,现有柔性康复手套多数仅能实现基于开环控制的康复运动,使得手部精细运动技能精准康复仍极具挑战。
针对以上挑战,研究人员综合手指皮肤褶皱结构的仿生原理和霍尔传感机制,创新性设计了集柔顺运动与精确感知一体的仿生指套结构,并据此提出了融合传感系统、形状记忆合金(SMA)驱动与智能控制系统、供能与热控系统和人机交互系统的柔性康复手套集成化设计方法。得益于SMA高功重比和集成化设计,柔性康复手套机器人自重仅490克,且具备独立工作能力。进一步,提出了多模态精细动作康复训练方法,从而实现手功能障碍患者便携、精准和安全的康复训练。临床试验初步验证了该便携式、低成本柔性康复手套机器人在精细运动康复以及生活辅助等方面的优势。
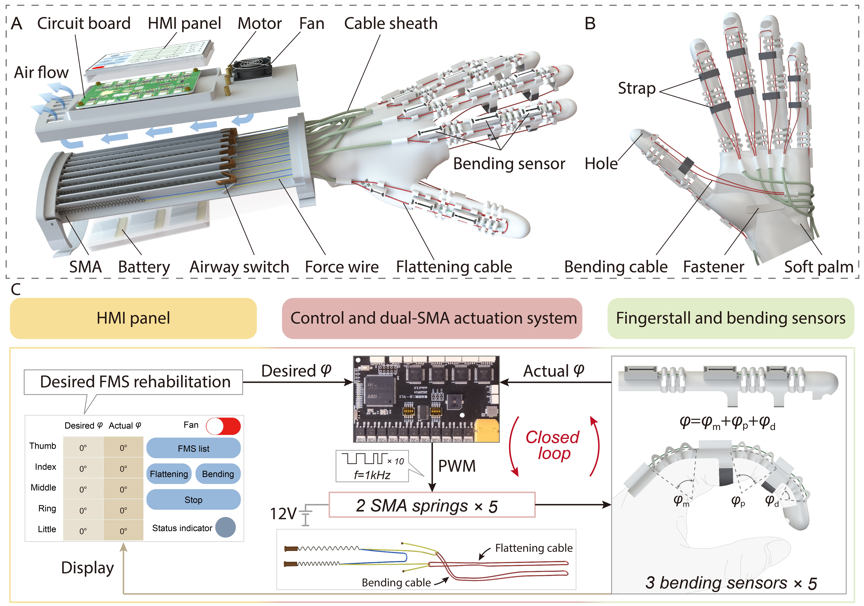
图1.柔性康复手套机器人系统设计
柔性康复手套机器人的驱动系统采用了类肌肉-肌腱的仿生结构设计(图1),以高功重比形状记忆合金(SMA)弹簧为驱动,后置于手臂组件中,利用具备多级力放大的绳索机构将SMA驱动形变传动至指套结构处,带动手指实现弯曲/伸展运动;同时在手臂设计了用于SMA冷却的可控风道系统,提高了SMA指套的驱动频率;从而使SMA驱动的位移、力和驱动频率的适应于手功能康复需求。此外,通过模仿手指背部褶皱皮肤,提出了一种非均匀刚度柔性指套的仿生设计方法,并以柔顺仿生运动为优化目标,开展柔性指套的构型优化分析;进一步,设计基于霍尔传感元件的关节传感系统,通过与柔性指套的非均匀刚度结构适配,降低了指套运动对传感系统的干扰,实现稳定、精确的手指状态感知。

图2.手部精细动作运动规划与康复训练
人手可以通过执行单一动作或其组合实现复杂操作。生活中90%的手部日常精细动作来源于拇指对指、指尖对指、三指捏、圆柱握、侧捏、握拳等六种单一动作及其组合。通过研究上述六种单一精细动作和组合动作的仿生运动机理,作者提出了精细动作康复策略及运动规划方法。利用所设计的指套感知系统精确获取手指运动状态,采用闭环反馈控制算法,实现了SMA指套的精确运动控制和精细动作运动,实现了患者手指精细运动的多模式康复训练(图2)。
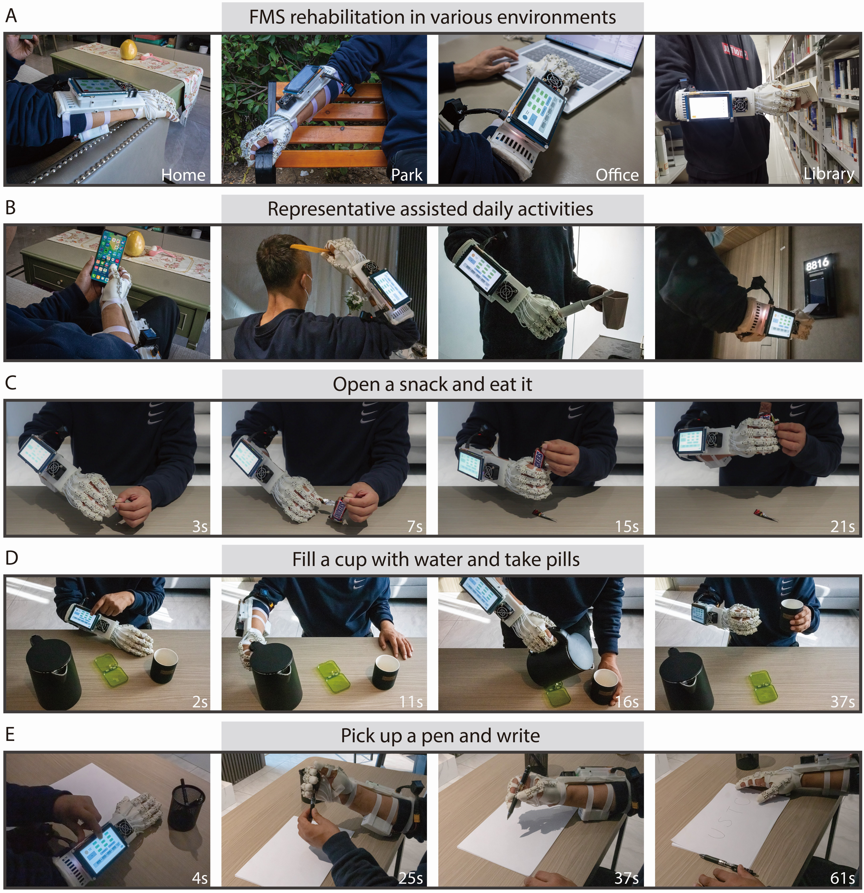
图3.柔性康复手套机器人的多场景应用与生活辅助功能
柔性康复手套机器人的轻质与高集成设计使其具有极高的便携性,使得患者的手功能康复训练脱离医院等固定康复场所,实现了如家庭、公园、办公室等场景的康复训练(图3)。由于形状记忆合金(SMA)驱动不会像流体驱动、电机驱动等产生噪音,研究人员也验证了其在低噪声环境中的使用可行性,如图书馆等。此外,临床实验表明患者通过人机交互界面输入期望动作,柔性康复手套能够辅助患者完成如梳头、刷牙、拆吃零食、喝药、写字等复杂任务;通过将患者的康复训练与日常生活需求相结合,实现精细动作技能康复与辅助患者生活的融合,大大拓展了柔性康复手套机器人的应用场景。
工程科学学院精密机械与精密仪器系博士生随梦理、欧阳一鸣,金虎副教授为论文第一作者。工程科学学院金虎副教授、王柳特任教授和张世武教授为论文通讯作者。论文的合作者还包括中国科学技术大学许旻副教授,澳大利亚伍伦贡大学李卫华教授等。中国科学技术大学附属第一医院(安徽省立医院)康复医学科吴鸣技师长和安徽医科大学第一附属医院小儿神经康复中心许晓燕副主任医师分别在手功能临床实验和精细动作技能康复方面提供了专业指导,该项研究工作得到了国家自然科学基金、安徽省重点研发计划、安徽省自然科学基金及中央高校基本科研业务专项资金的支持。
近年来,由中国科大工程科学学院机器人与智能装备研究所团队在形状记忆合金(SMA)驱动器的精确控制方面开展深入研究,取得了系列进展,为康复手套机器人的精细运动控制奠定了良好基础。团队首先针对基于SMA弹簧的柔性臂模块进行运动学建模,结合霍尔传感和PID方法,实现了SMA柔性臂模块的阶梯弯曲运动以及空间三维精确位置控制。成果以"Design and Implementation of a Soft Robotic Arm Driven by SMA Coils"为题发表在IEEE Transactions on Industrial Electronics。接着,团队对更轻的SMA丝驱动的薄片驱动器进行研究,通过SMA本构方程的线性简化建模及模型反馈控制,实现了SMA薄片驱动器的位置和速度控制,突破了SMA软体机器人应用瓶颈。成果分别以"Modeling and Motion Control of a Soft SMA Planar Actuator"为题发表在IEEE/ASME Transactions on Mechatronics和以"ShapeandForceSensingof a Soft SMA Planar Actuator for Soft Robots"为题发表在2021 IEEE International Conference on Robotics and Biomimetics (Finalist of Best Student Paper Award)。
论文链接:
NatureMachineIntelligence论文:
https://www.nature.com/articles/s42256-023-00728-z
IEEE Transactions on Industrial Electronics论文
https://ieeexplore.ieee.org/document/8478187
IEEE/ASME Transactions on Mechatronics论文:
https://ieeexplore.ieee.org/document/9411719
IEEERobio2021论文
https://ieeexplore.ieee.org/document/9739439
(工程科学学院、科研部)
来源:中国科大







 热门推荐
热门推荐









-
.png)
 顾问老师
顾问老师扫码添加顾问老师

-
.png)
 微信客服
微信客服扫码添加平台客服

-
.png)
 客服电话
客服电话电话:13922151049
-
.png)
 公众号
公众号关注AEIC公众号查看更多资讯

